Given two line segments (p1, q1) and (p2, q2), find if the given line segments intersect with each other.
Before we discuss solution, let us define notion of orientation. Orientation of an ordered triplet of points in the plane can be
–counterclockwise
–clockwise
–colinear
The following diagram shows different possible orientations of (a, b, c)

Note the word ‘ordered’ here. Orientation of (a, b, c) may be different from orientation of (c, b, a).
How is Orientation useful here?
Two segments (p1,q1) and (p2,q2) intersect if and only if one of the following two conditions is verified
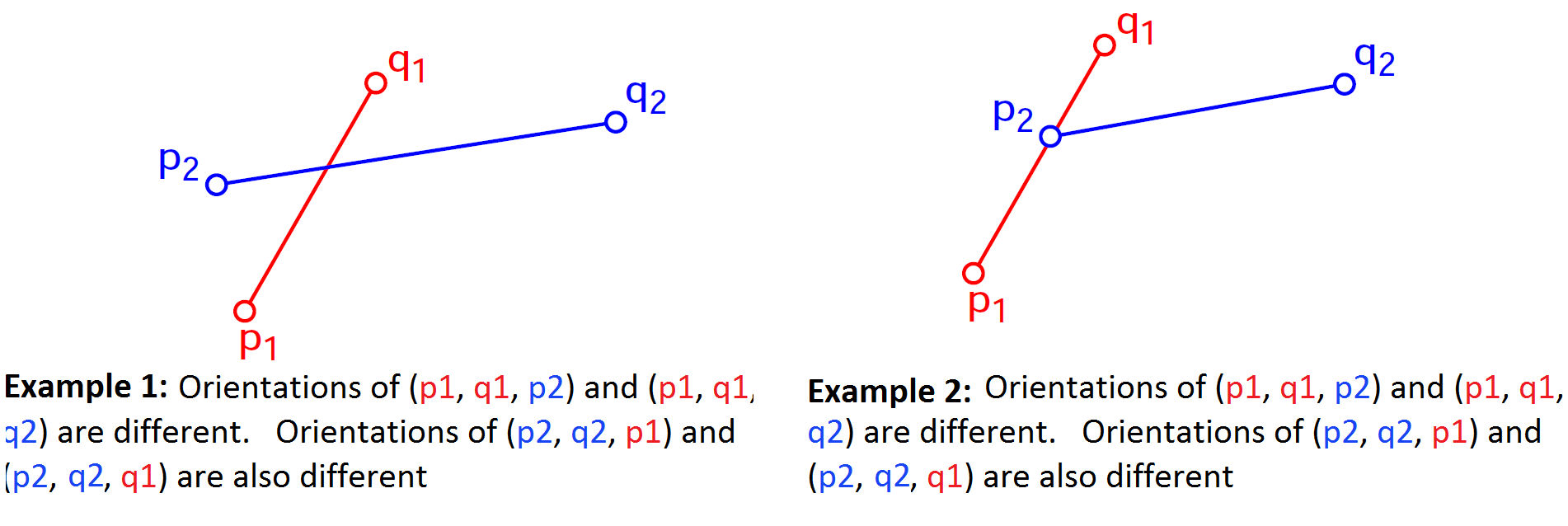
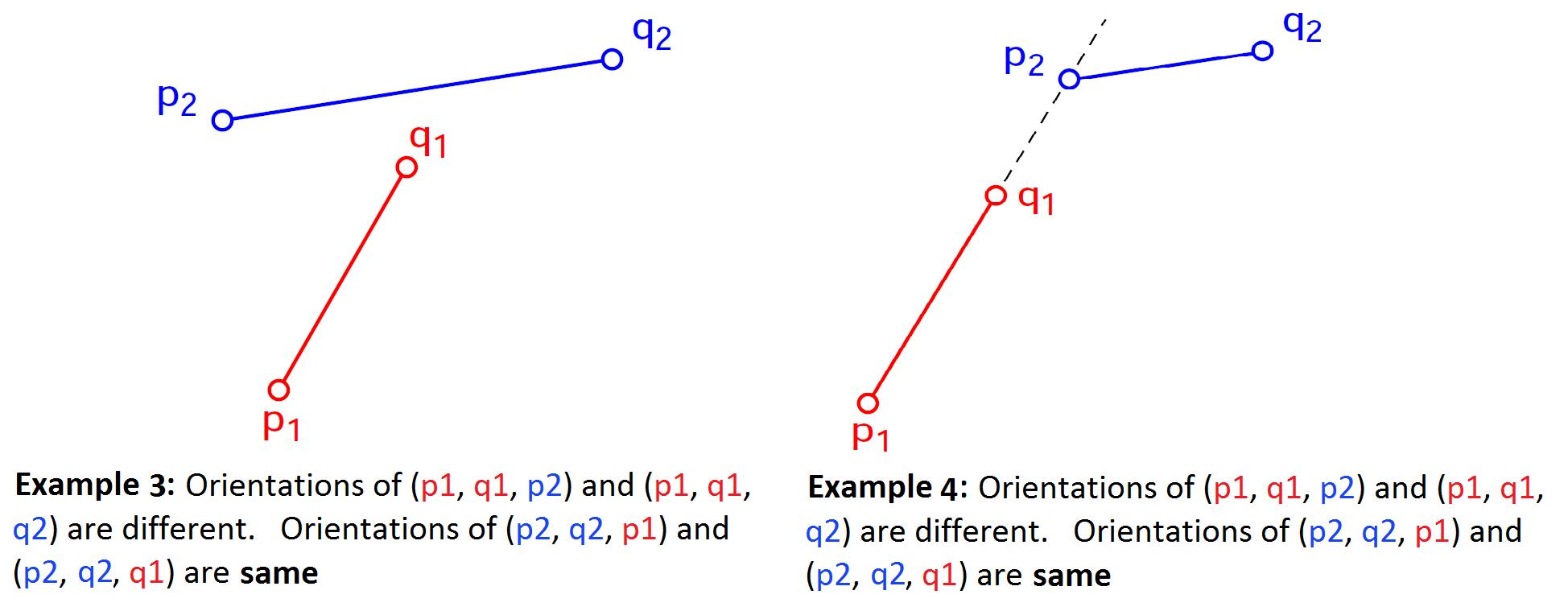
1. General Case:
- (p1, q1, p2) and (p1, q1, q2) have different orientations and
- (p2, q2, p1) and (p2, q2, q1) have different orientations
2. Special Case
- (p1, q1, p2), (p1, q1, q2), (p2, q2, p1), and (p2, q2, q1) are all collinear and
- the x-projections of (p1, q1) and (p2, q2) intersect
- the y-projections of (p1, q1) and (p2, q2) intersect
Examples of General Case:


Examples of Special Case:

Following is C++ implementation based on above idea.
Output:
http://www.dcs.gla.ac.uk/~pat/52233/slides/Geometry1x1.pdf
Before we discuss solution, let us define notion of orientation. Orientation of an ordered triplet of points in the plane can be
–counterclockwise
–clockwise
–colinear
The following diagram shows different possible orientations of (a, b, c)

Note the word ‘ordered’ here. Orientation of (a, b, c) may be different from orientation of (c, b, a).
How is Orientation useful here?
Two segments (p1,q1) and (p2,q2) intersect if and only if one of the following two conditions is verified
1. General Case:
- (p1, q1, p2) and (p1, q1, q2) have different orientations and
- (p2, q2, p1) and (p2, q2, q1) have different orientations
2. Special Case
- (p1, q1, p2), (p1, q1, q2), (p2, q2, p1), and (p2, q2, q1) are all collinear and
- the x-projections of (p1, q1) and (p2, q2) intersect
- the y-projections of (p1, q1) and (p2, q2) intersect
Examples of General Case:
Examples of Special Case:

Following is C++ implementation based on above idea.
// A C++ program to check if two given line segments intersect#include <iostream>using namespace std;struct Point{ int x; int y;};// Given three colinear points p, q, r, the function checks if// point q lies on line segment 'pr'bool onSegment(Point p, Point q, Point r){ if (q.x <= max(p.x, r.x) && q.x >= min(p.x, r.x) && q.y <= max(p.y, r.y) && q.y >= min(p.y, r.y)) return true; return false;}// To find orientation of ordered triplet (p, q, r).// The function returns following values// 0 --> p, q and r are colinear// 1 --> Clockwise// 2 --> Counterclockwiseint orientation(Point p, Point q, Point r){ int val = (q.y - p.y) * (r.x - q.x) - (q.x - p.x) * (r.y - q.y); if (val == 0) return 0; // colinear return (val > 0)? 1: 2; // clock or counterclock wise}// The main function that returns true if line segment 'p1q1'// and 'p2q2' intersect.bool doIntersect(Point p1, Point q1, Point p2, Point q2){ // Find the four orientations needed for general and // special cases int o1 = orientation(p1, q1, p2); int o2 = orientation(p1, q1, q2); int o3 = orientation(p2, q2, p1); int o4 = orientation(p2, q2, q1); // General case if (o1 != o2 && o3 != o4) return true; // Special Cases // p1, q1 and p2 are colinear and p2 lies on segment p1q1 if (o1 == 0 && onSegment(p1, p2, q1)) return true; // p1, q1 and q2 are colinear and q2 lies on segment p1q1 if (o2 == 0 && onSegment(p1, q2, q1)) return true; // p2, q2 and p1 are colinear and p1 lies on segment p2q2 if (o3 == 0 && onSegment(p2, p1, q2)) return true; // p2, q2 and q1 are colinear and q1 lies on segment p2q2 if (o4 == 0 && onSegment(p2, q1, q2)) return true; return false; // Doesn't fall in any of the above cases}// Driver program to test above functionsint main(){ struct Point p1 = {1, 1}, q1 = {10, 1}; struct Point p2 = {1, 2}, q2 = {10, 2}; doIntersect(p1, q1, p2, q2)? cout << "Yes\n": cout << "No\n"; p1 = {10, 0}, q1 = {0, 10}; p2 = {0, 0}, q2 = {10, 10}; doIntersect(p1, q1, p2, q2)? cout << "Yes\n": cout << "No\n"; p1 = {-5, -5}, q1 = {0, 0}; p2 = {1, 1}, q2 = {10, 10}; doIntersect(p1, q1, p2, q2)? cout << "Yes\n": cout << "No\n"; return 0;} |
No Yes NoSources:
http://www.dcs.gla.ac.uk/~pat/52233/slides/Geometry1x1.pdf
No comments:
Post a Comment